RBKM - Multirotor
Multirotor Components and Vortex Ring Awareness
Connect multirotor hardware, lift, control response and descent hazards into one practical operating picture.
Lesson record
- Status
- Current source aligned
- Reviewed
- 2026-05-18
- Source pages
- RePL Study Guide pp. 142-183; Part 101 MOS C10 pp. 111-113.
- Reviewer
- National Drones publication review
A multirotor is simple to fly until margins shrink
Modern stabilisation can make a multirotor feel easy, but the pilot still needs to understand motors, arms, battery mounting, GPS, flight controller behaviour and how weight, power, ground effect and wind change performance.
Descent planning matters. A steep vertical descent in disturbed rotor airflow can lead toward vortex ring state, especially with little horizontal movement and high power demand.

Know the components and what they do
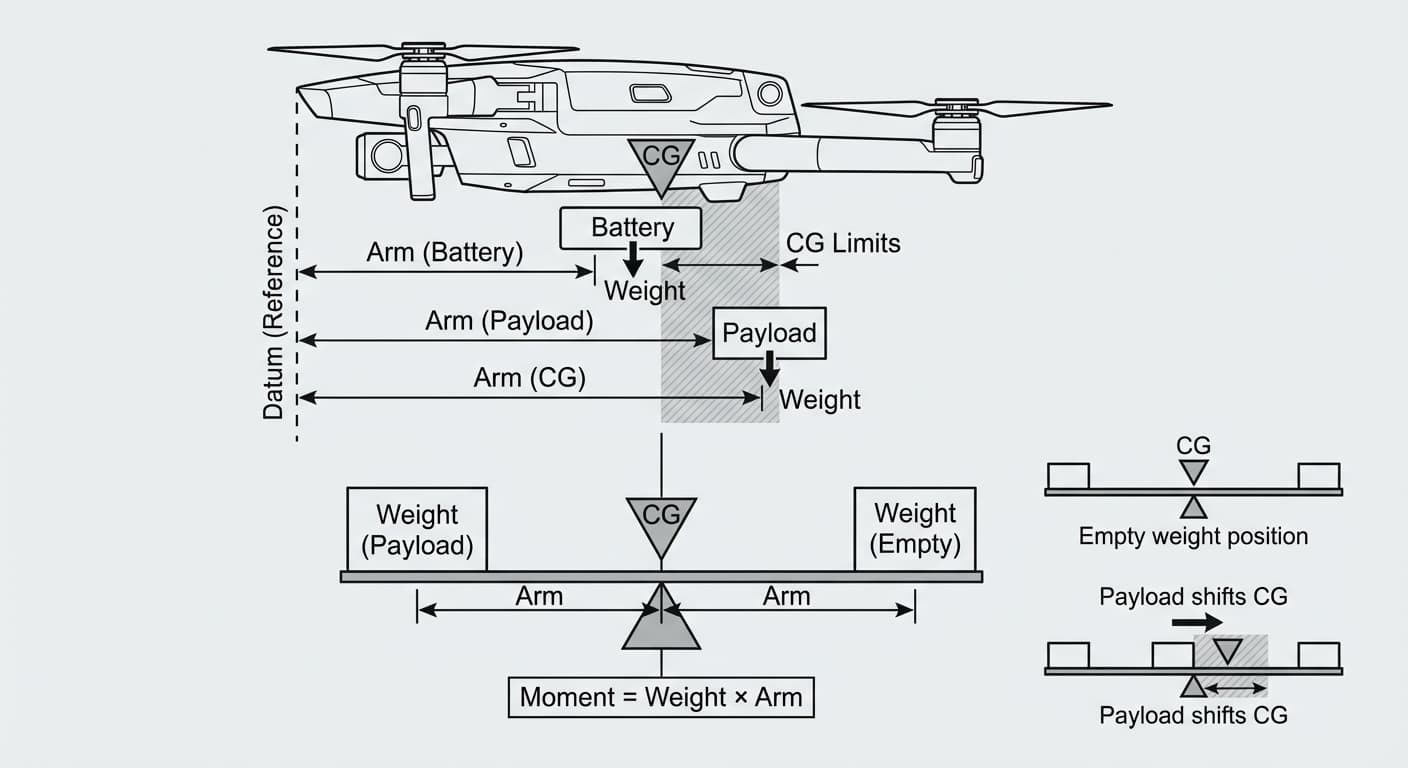
The centre body, arms, motors, motor mounts, landing gear, battery mount and payload fittings carry the loads. The ESCs, receiver, antennas, IMU, flight controller, GPS and battery make the aircraft controllable.
Component knowledge is practical. A cracked arm, loose motor, damaged antenna, shifting battery or poor GPS installation can change the flight before the pilot sees a clear warning.
- Inspect arms, mounts, propellers, landing gear, battery retention and payload attachment.
- Check antennas and GPS/compass areas for damage or interference risks.
- Treat unfamiliar vibration, noise or control response as a reason to land and inspect.
Weight, power, ground effect and wind change performance
More weight means more thrust is needed to hover, climb and stop descent. Less power margin means the aircraft has less spare control authority when wind, heat, altitude or payload demand increases.
Ground effect can make a multirotor feel more efficient close to the surface, but that help fades with height. Wind can improve or degrade the recovery and landing picture depending on direction, turbulence and available space.
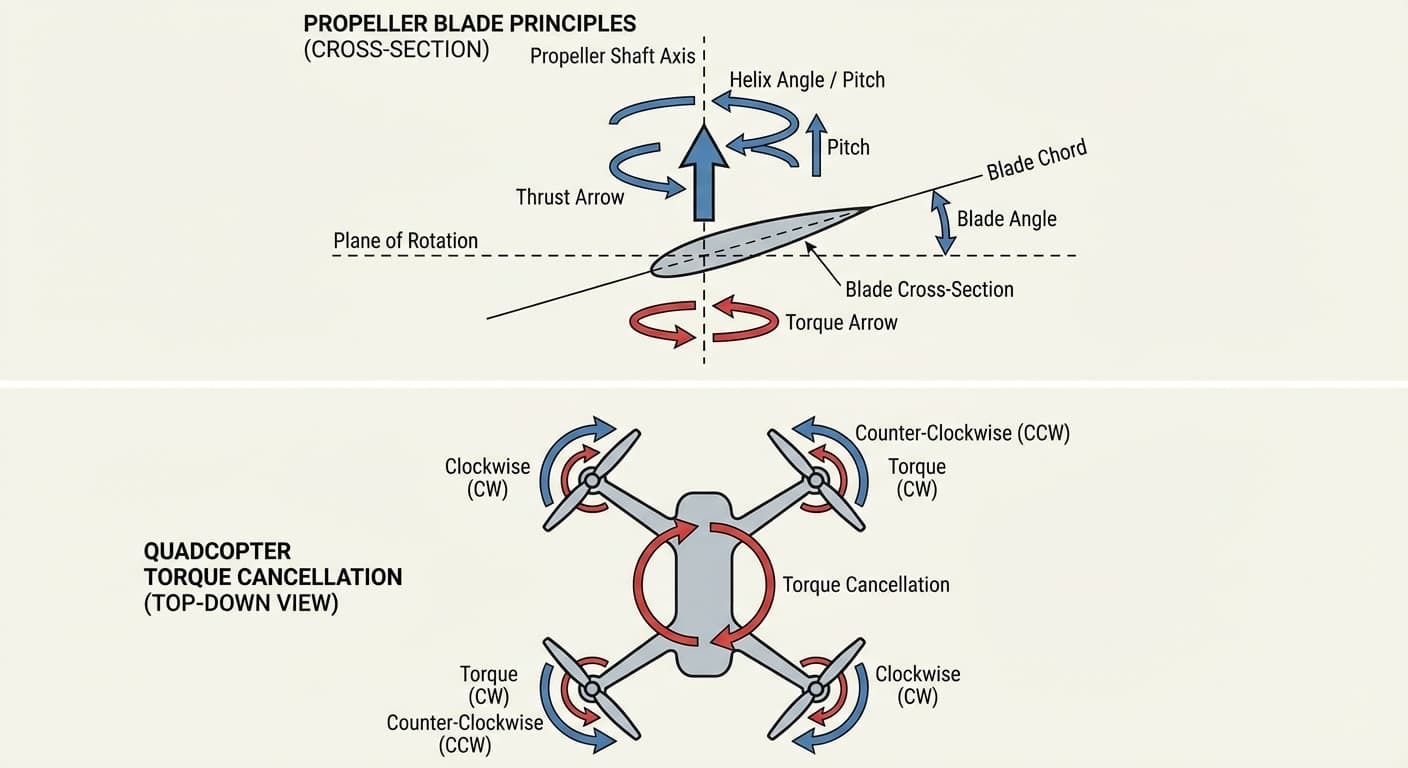
Rotor blades make lift, drag and torque
A rotor blade is an aerofoil. Blade shape, twist and taper help create useful thrust across a spinning disc where the inner and outer parts of the blade move at different speeds.
The pilot does not directly feel rotor thrust or torque, but they see the result as hover performance, yaw authority, climb response and control margin.
Hovering and forward flight are different airflow problems
In a hover, the aircraft is working in a mostly vertical airflow pattern. In forward flight, the rotor disc meets cleaner air and the aircraft also deals with drag from the frame and payload.
This is why a multirotor can feel different when it transitions from hover to forward flight, turns downwind, or descends near obstacles and turbulent air.
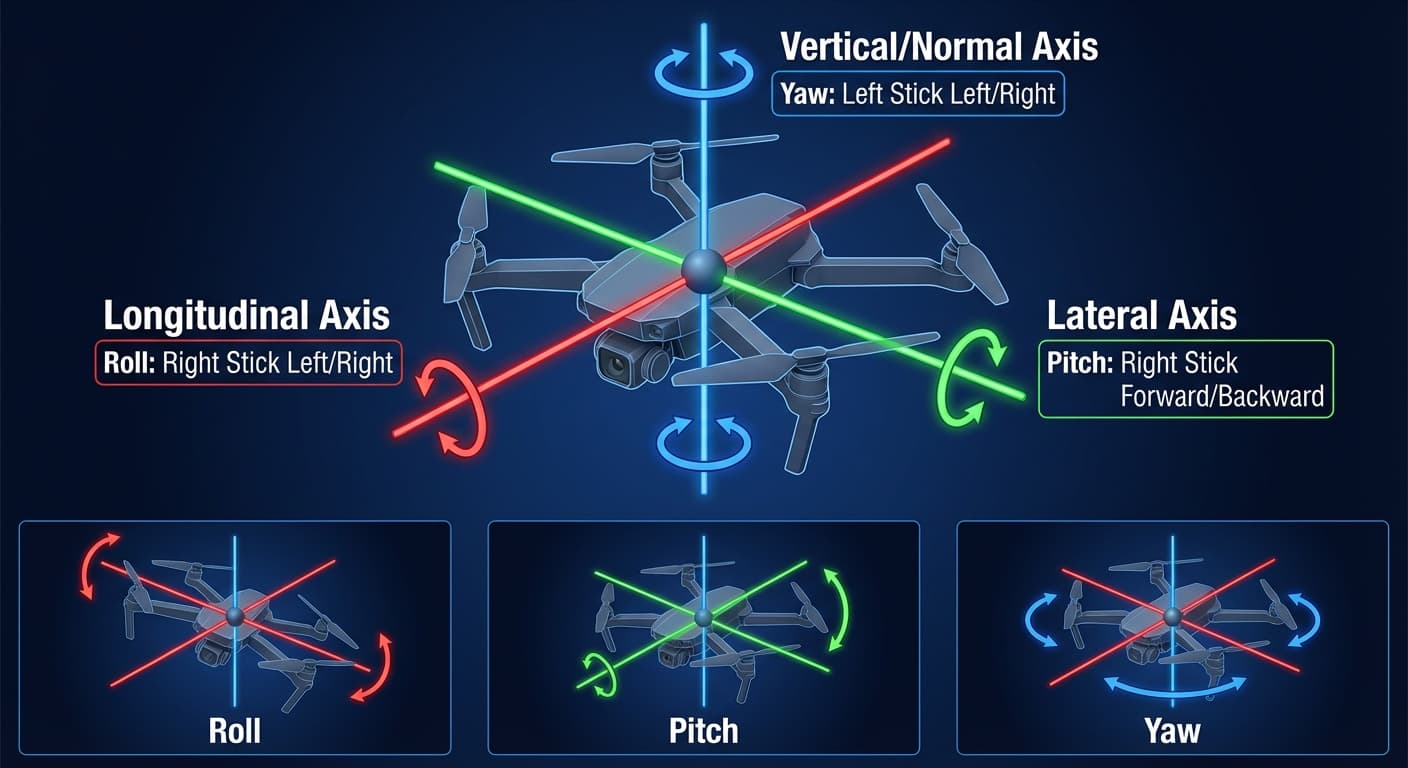
Controls move the aircraft around three axes
Roll, pitch, yaw and throttle commands are translated by the flight controller into motor-speed changes. Stabilisation and GPS hold can make this feel simple, but the pilot should still understand what the aircraft is trying to do.
If GPS hold is unavailable, wind and inertia become more obvious. If stabilisation is degraded, the pilot may need a much simpler recovery plan.
Launch and climb are performance checks
Pre-launch checks confirm that the aircraft, crew, site and airspace are ready. Post-launch checks confirm that the aircraft is actually performing as expected before it moves away from the recovery area.
Climb performance is affected by weight, power, airspeed, wind, bank angle, temperature and altitude. A slow climb or unexpected drift early in the flight is useful information, not something to ignore.
Turns and descents need margin
Banked turns, flat turns and steep manoeuvres all have limits. The tighter the area and the stronger the wind, the more important it is to slow down and leave space for correction.
Descending, landing and recovery should be planned into wind where appropriate and with enough horizontal and vertical margin to avoid disturbed airflow, obstacles and rushed control inputs.
Recover by changing the airflow problem
The practical idea behind vortex ring recovery is to leave the disturbed column of air. That normally means reducing the vertical descent condition and moving laterally or forward as appropriate for the aircraft and environment.

- Avoid steep vertical descents with little horizontal movement.
- Keep enough height and lateral room for recovery.
- Use the manufacturer's recovery guidance and operator procedures for the aircraft in use.
Abnormal multirotor behaviour needs early action
Incorrect propeller installation, motor failure, ESC failure, GPS loss, IMU disagreement, loose payload or structural damage can all create abnormal behaviour. Stabilisation may mask the early signs until the margin is already shrinking.
If the aircraft yaws unexpectedly, will not hold position, vibrates abnormally, climbs poorly or shows repeated warnings, simplify the task and recover while the aircraft is still controllable.
Practice Questions
Why can a straight vertical descent be risky for a multirotor?
- It can keep the aircraft in disturbed rotor airflow and increase vortex ring risk.
- It always charges the battery.
- It removes the need for wind awareness.
- It only affects fixed-wing aircraft.
Answer: It can keep the aircraft in disturbed rotor airflow and increase vortex ring risk.
Descending through disturbed rotor airflow can reduce control margin and requires proper recovery technique.
Why are post-launch checks important for a multirotor?
- They confirm the aircraft is responding normally before it leaves the recovery area.
- They replace all pre-flight checks.
- They are only needed for fixed-wing RPA.
- They prove wind cannot affect the aircraft.
Answer: They confirm the aircraft is responding normally before it leaves the recovery area.
A short controlled check after launch can reveal performance, control or sensor problems early.
Which condition can reduce multirotor climb performance?
- Increased weight, reduced power margin, high temperature or higher altitude.
- A clear job pack only.
- A fully briefed observer.
- A clean launch pad with no obstacles.
Answer: Increased weight, reduced power margin, high temperature or higher altitude.
Climb performance depends on available thrust and environmental conditions.
What is a practical warning sign of abnormal multirotor operation?
- Unexpected yaw, vibration, poor position hold or repeated system warnings.
- A completed pre-flight briefing.
- A stable hover in calm wind.
- A clean payload mount.
Answer: Unexpected yaw, vibration, poor position hold or repeated system warnings.
Abnormal behaviour should trigger early recovery and inspection.
Next step after study
Complete your Remote Pilot Licence training
The free study guide is a strong theory foundation. To actually be issued with a RePL, students still complete approved training, practical flying and assessment with a certified provider.